Dual-Balancing PINN论文阅读(上)
Physics-Informed Neural Networks
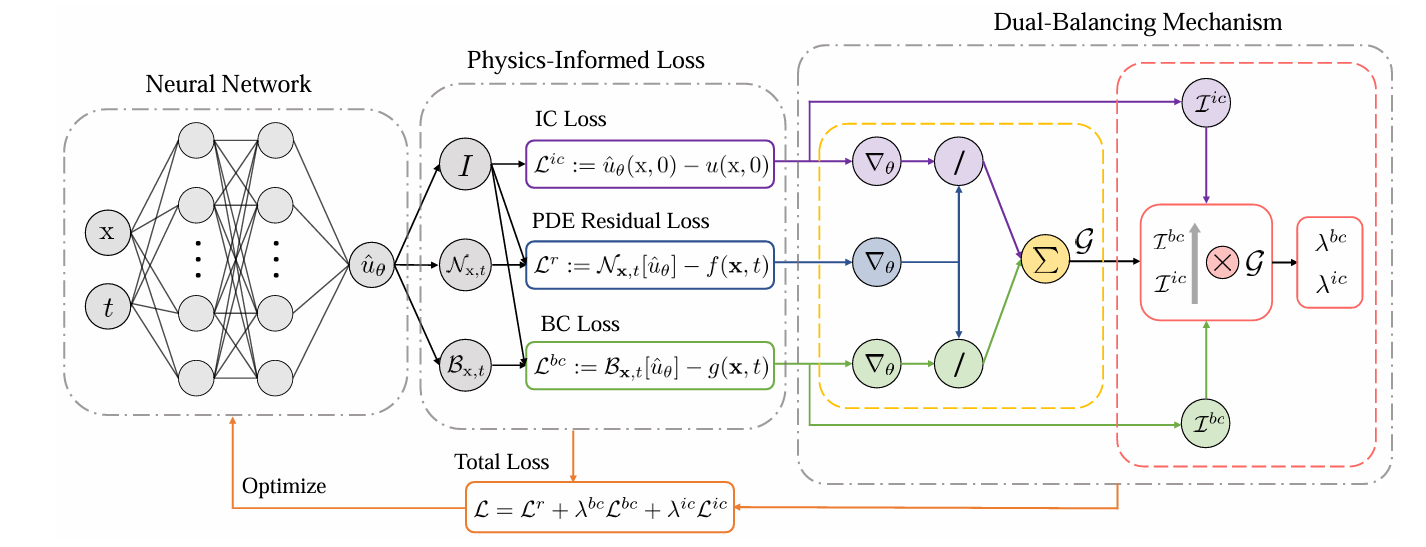
核心是构建一个带参数 $\theta$ 的神经网络来学习PDE的近似解 $\hat{u}_\theta (\mathbf{x}, t)$
在时空域$(\Omega \times [0, T])$中采样点$\left{ \left( \mathbf{X}i^r, t_i^r \right) \right}{i=1}^{N_r}$,计算PDE残差损失:
再加上一众条件损失,如边界条件,初始条件,以及额外的数据。
在PINN的训练中,权重系数是一个影响巨大却难以调节的数字,许多学者寻找动态权重的方法,当前主要的两种路线是the learning approach and the calculating approach。
learning approach视权重系数为可学习的参数,在网络中一同优化;calculating approach以neural tangent kernel (NTK)的视角,基于梯度幅值的比率$\left| \nabla\theta \mathcal{L}^r \right| / \left| \nabla\theta \mathcal{L}^i \right|$对权重进行计算。DB-PINN就是对现有calculating approach中的具体做法GW-PINN进行补充。
GW-PINN
旨在跨平衡(inter-balancing),如上图中黄色边框内部所示。以往研究表明,PDE残差通常在各损失项中占主导地位,现在把残差项的权重系数固定为1,在训练过程中调整其余条件损失项的权重。
通常总损失包括四个原子损失,残差损失$Lr$,边界损失$L{bc}$,初始损失$L{ic}$,数据损失$L{d}$,
实际训练时常出现梯度失衡:某一项对网络参数的反传梯度远大于其它项,导致别的项“学不到东西”。
GW-PINN要做的,就是让各类损失对网络参数的梯度量级对齐。做法是:给每个条件项一个权重
其中 $s_r$ 是“残差项的梯度尺度”,$s_i$ 是第 $i$ 个条件项($bc,ic,d$)的梯度尺度。这样当某条件项梯度偏小,它的 $\lambda_i$ 就被放大,反之缩小,实现跨类(inter)的对齐。
基于不同的 $s_r$ 和 $s_i$ 算法,GW-PINN有3种不同实现:
method 1,mean 版:
更新权重:
这里用了EMA(Exponential Moving Average)平滑进行权重更新,抑制瞬时噪声,比如$\alpha$ 取0.1
method 2,std 版:
同上更新
method 3,kurt 版:
先构造$\text{cov} = \text{std}/\text{kurt}$,再更新权重:
在代码中,以 method 1 为例:1
2
3
4
5
6
7
8if method == 1:
# max/avg
lamb_hat = maxr/meanb
lambd_bc = (1-alpha_ann)*lambd_bc + alpha_ann*lamb_hat
lamb_hat = maxr/meani
lambd_ic = (1-alpha_ann)*lambd_ic + alpha_ann*lamb_hat
lamb_hat = maxr/meand
lambd_d = (1-alpha_ann)*lambd_d + alpha_ann*lamb_hat
要用到的 max mean std kurt 由 loss_grad_stats 和 loss_grad_max_mean 函数给出:1
2
3
4
5
6
7
8
9stdr,kurtr=loss_grad_stats(l_reg, net)
stdb,kurtb=loss_grad_stats(l_bc, net)
stdi,kurti=loss_grad_stats(l_ic, net)
stdd,kurtd=loss_grad_stats(l_data, net)
maxr,meanr=loss_grad_max_mean(l_reg, net)
maxb,meanb=loss_grad_max_mean(l_bc, net,lambg=lambd_bc)
maxi,meani=loss_grad_max_mean(l_ic, net,lambg=lambd_ic)
maxd,meand=loss_grad_max_mean(l_data, net,lambg=lambd_d)
注意为了稳定,每 10 个 Adam step 更新一次权重 (LBFGS更新太慢,一般不在这里更新了)1
if epoch % mm == 0: # mm = 10
最后得到的权重带入总损失计算:1
loss = l_reg + lambd_bc.item()*l_bc + lambd_ic.item()*l_ic + lambd_d.item()*l_data
注意.item() 明确切到 Python 标量,不参与计算图(不希望 λ 反传)
max mean std kurt 的算法
以 method 1 为例,残差项的“尺度”为
也就是:把 $L_r$ 对“所有可训练参数 $\theta$ ”的梯度,取绝对值后的全局最大值。
条件项(bc/ic/data)的“尺度”为
也就是:对每个条件项 $L_i$,在当前权重 $\lambda_i$ 下,对所有参数的梯度,取绝对值后的整体均值。注意这里有$\lambda_i$,对应着 loss_grad_max_mean 函数中的 lambg 参数,因为残差项 $L_r$ 权重默认为1,故无需传入 lambg 参数。
loss_grad_max_mean 函数的具体实现如下1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37def loss_grad_max_mean(loss, net, lambg=1):
"""
inputs: loss: loss function ; net: the NN model; lambg : term for weighted stats (optional)
outputs: max and mean
"""
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
grad_ = torch.zeros((0), dtype=torch.float64,device=device)
# 遍历网络所有层,只看 nn.Linear 的参数(权重和偏置)
for m in net.modules():
if not isinstance(m, nn.Linear):
continue
if(m == 0):
w = torch.abs(lambg*grad(loss, m.weight, retain_graph=True, allow_unused=True)[0])
b = torch.abs(lambg*grad(loss, m.bias, retain_graph=True, allow_unused=True)[0])
grad_ = torch.cat((w.view(-1), b))
else:
w = torch.abs(lambg*grad(loss, m.weight, retain_graph=True, allow_unused=True)[0]) # 绝对值
if grad(loss, m.bias, retain_graph=True, allow_unused=True)[0] is None:
b = None
else:
b = torch.abs(lambg*grad(loss, m.bias, retain_graph=True, allow_unused=True)[0])
if b is not None:
grad_ = torch.cat((grad_,w.view(-1), b))
else:
grad_ = torch.cat((grad_,w.view(-1)))
# 梯度绝对值的最大与平均
maxgrad = torch.max(grad_)
meangrad = torch.mean(grad_)
return maxgrad,meangrad
在遍历网络所有层后,对所有参数 $p$ (m.weight,m.bias),取$\nabla_{p}loss$:1
torch.autograd.grad(loss, p, retain_graph=True, allow_unused=True)[0]
乘以传入的 lambg 后再取绝对值,展平,拼接为超长一维向量 grad_ ,代表该损失在当前权重下对整个网络的梯度幅值分布。
std kurt 的取值类似在 loss_grad_stats 中给出。
Reference
[2505.11117v3] Dual-Balancing for Physics-Informed Neural Networks